Article Peer-Reviewed
Electrical-hydraulic Modeling and Simulation in MATLAB/Simulink of an Industrial Multi-service Vehicle for Tunneling
1
DRIVE Laboratory EA1859, University of Burgundy, 58000 Nevers, France
2
METALLIANCE Company, 71230 Saint-Vallier, France
*
For correspondence.
Academic Editors:
 Boyuan Li, Chao Huang, Anh-Tu Nguyen, , , Peng Hang, Georgios Papaioannou and
Boyuan Li, Chao Huang, Anh-Tu Nguyen, , , Peng Hang, Georgios Papaioannou and
Received: 15 September 2023 Accepted: 27 November 2023 Published: 20 December 2023
This article is part of the Special Issue Feature Papers to the Inaugural Volume of Highlights of Vehicles.
Abstract
The land transport sector has gone through multiple phases of evolution in vehicle design, development, and manufacturing. In particular, the construction sector continues to move towards autonomous vehicles, which have been one of the major trends and have become a hot topic in the industrial and academic world. With this new technology of assistance systems, which control the hydraulic actuators of a car (steering wheel, accelerator, and brake), humans are freed from driving tasks and the number of traffic accidents will be reduced. The modeling and simulation phases play a major role in the development of the construction machine in order to simulate the dynamic behavior of the vehicle and adjust all the parameters beforehand, so that the automated functionality will be easy to realize, and safety will be improved with high accuracy. The objective of this paper is to design a hydro-electric industrial vehicle model for the company METALLIANCE using MATLAB/Simulink environment and compare its simulation with experimental tests. The study addresses the modeling of industrial machines based on the mathematical description of the vehicle dynamics by defining for real-time evaluation of the different vehicle parameters, verifying, and validating the simulation model by comparison with real recorded data.
Graphical Abstract
Figures in this Article
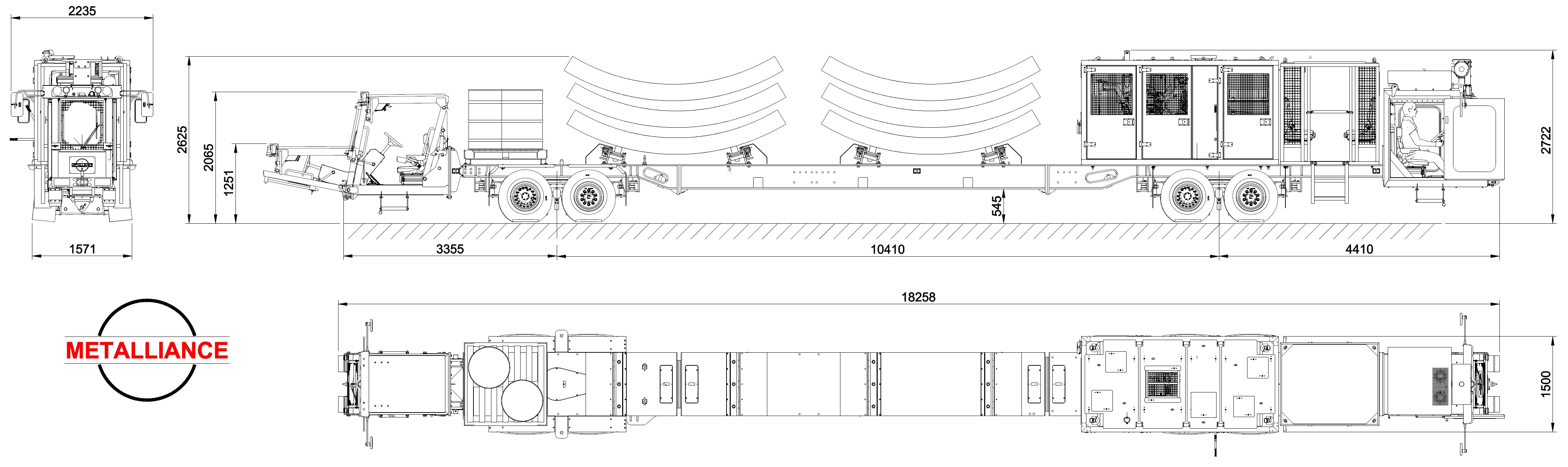
 Figure 1A
Figure 1A
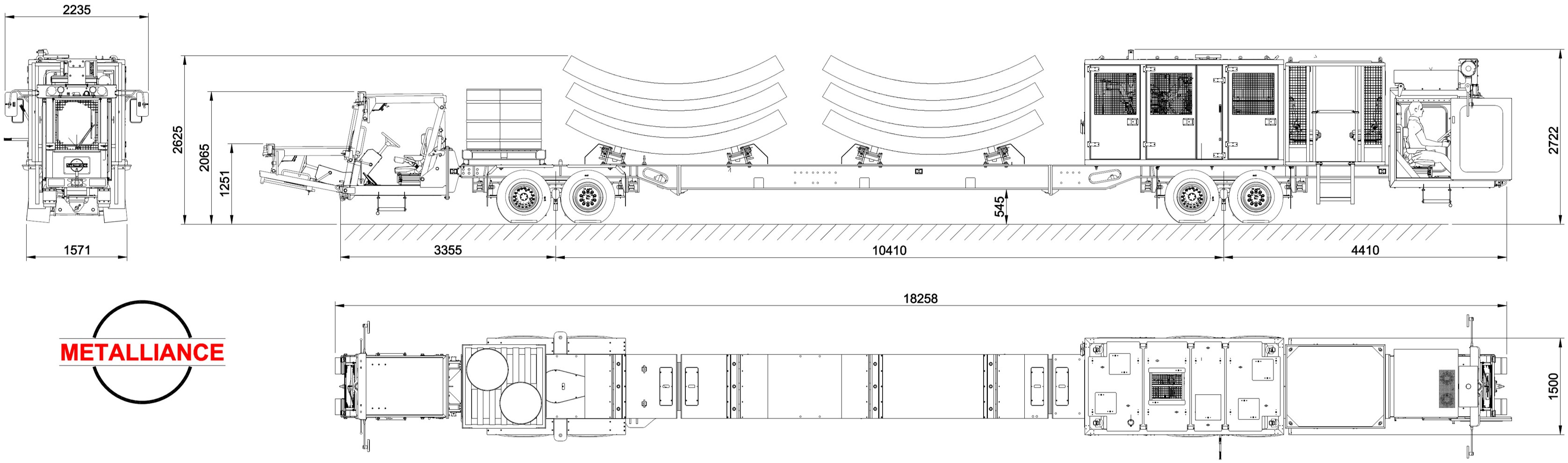 Figure 1B
Figure 1B
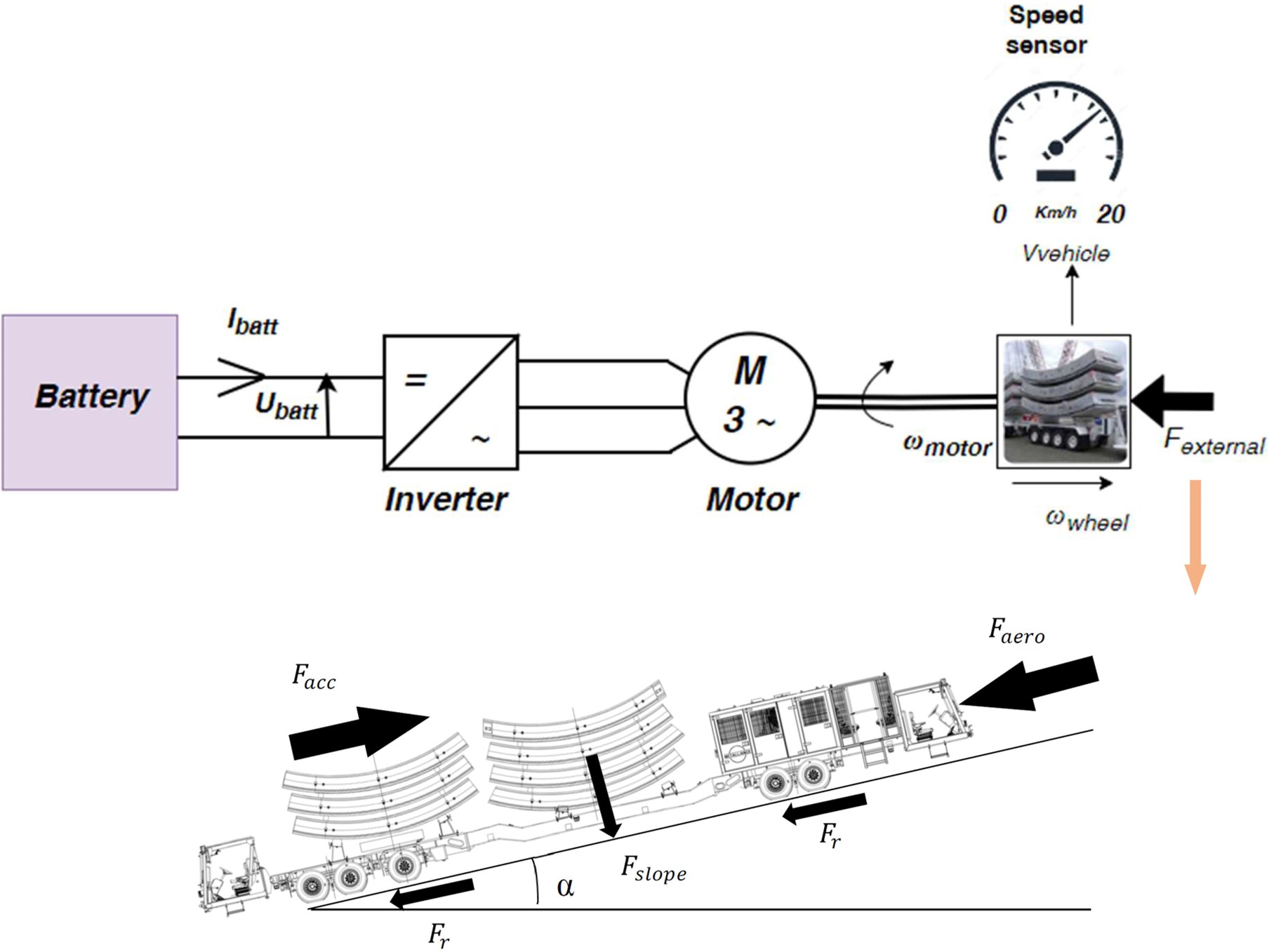 Figure 2
Figure 2
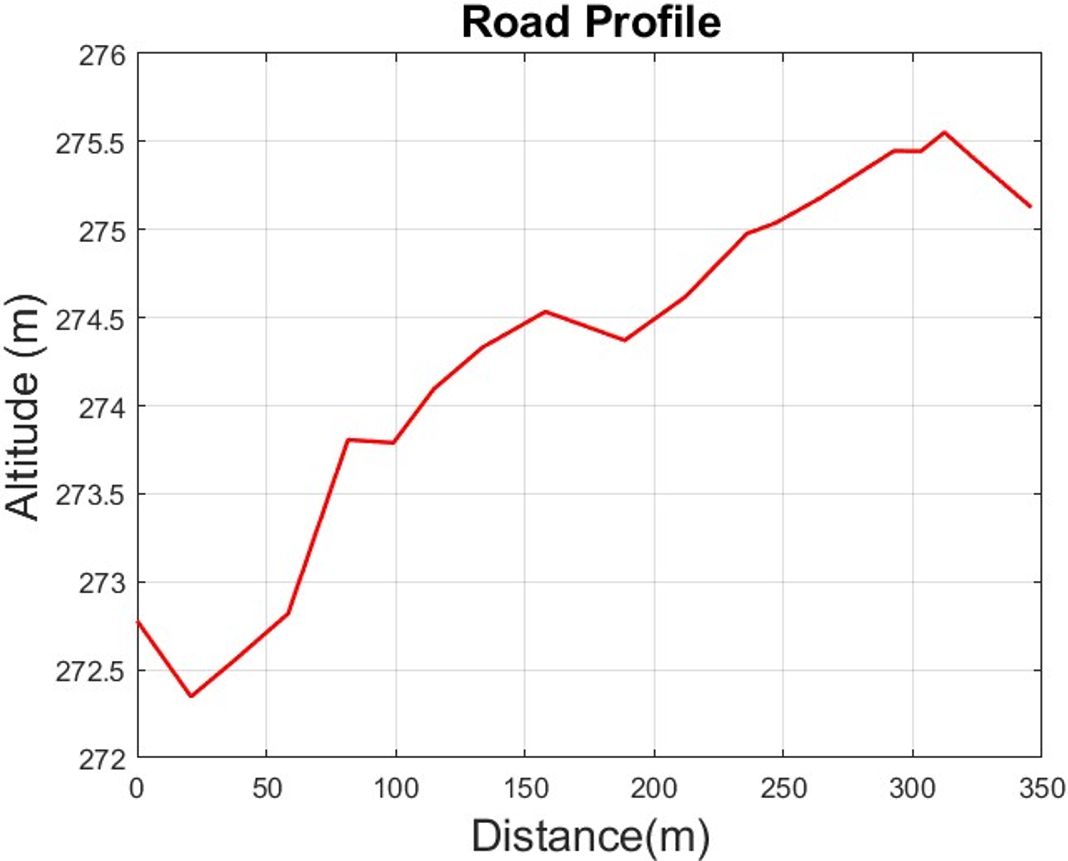 Figure 3
Figure 3
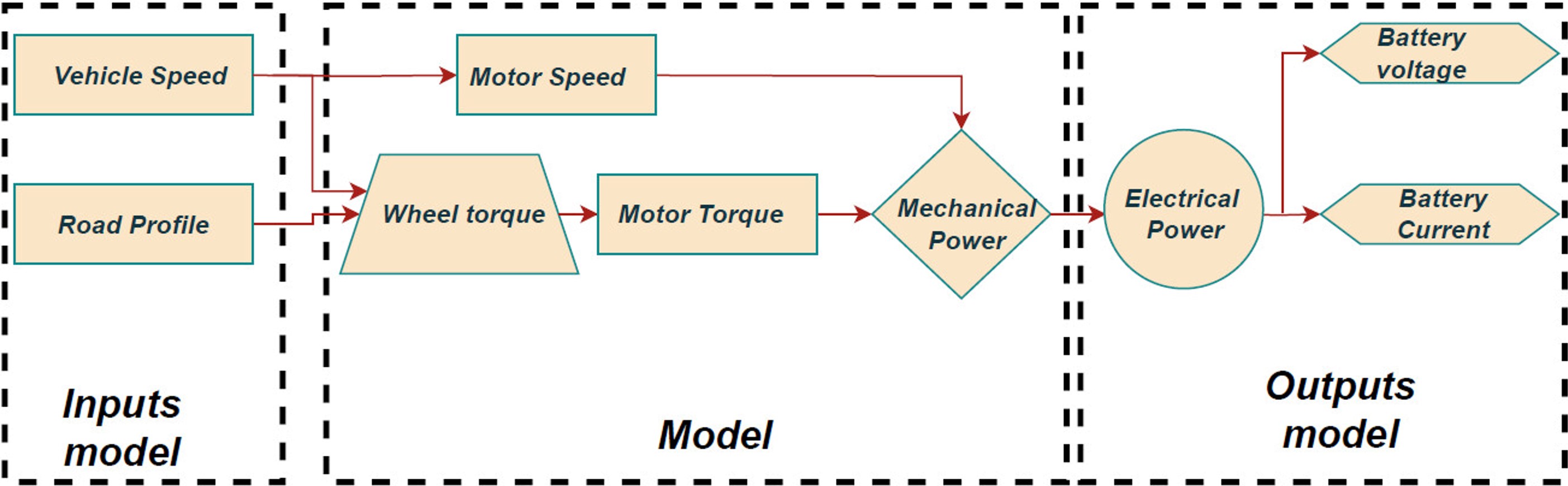 Figure 4
Figure 4
 Figure 5
Figure 5
 Figure 6
Figure 6
 Figure 7A
Figure 7A
 Figure 7B
Figure 7B
 Figure 7C
Figure 7C
 Figure 8
Figure 8
 Figure 9
Figure 9
 Figure 10
Figure 10
 Figure 11
Figure 11
Keywords
vehicle system modeling; vehicle dynamics; construction machinery; simulation; tunnel environment; traction and suspension control; electrical-hydraulic modeling
Copyright © 2023
Samaali et al. This article is distributed under the terms of the Creative Commons Attribution License (CC BY 4.0), which permits unrestricted use and distribution provided that the original work is properly cited.
Funding
This study and research work is part of the SIMVA-2 project which is funded and supported by the French government’s stimulus plan to preserve jobs in research and development (Plan de relance).
Cite this Article
Samaali, M., Aglzim, E.-H., Dessertenne, X., & Dubreuille, P. (2023). Electrical-hydraulic Modeling and Simulation in MATLAB/Simulink of an Industrial Multi-service Vehicle for Tunneling. Highlights of Vehicles, 1(2), 68–85. https://doi.org/10.54175/hveh1020005
References
1.
Jo, K., Kim, C., & Sunwoo, M. (2018). Simultaneous Localization and Map Change Update for the High-Definition Map-Based Autonomous Driving Car. Sensors, 18(9), 3145. https://doi.org/10.3390/s18093145
2.
Benjamin, P., Patki, M., & Mayer, R. (2006). Using Ontologies for Simulation Modeling. In Proceedings of the 2006 Winter Simulation Conference (pp. 1151–1159). IEEE. https://doi.org/10.1109/WSC.2006.323206
3.
Stabile, P., Ballo, F., Mastinu, G., & Gobbi, M. (2021). An Ultra Efficient Lightweight Electric Vehicle—Power Demand Analysis to Enable Lightweight Construction. Energies, 14(3), 766. https://doi.org/10.3390/en14030766
4.
Alexander, A., & Vacca, A. (2017). Longitudinal vehicle dynamics model for construction machines with experimental validation. International Journal of Automotive and Mechanical Engineering, 14(4), 4616–4633. https://doi.org/10.15282/ijame.14.4.2017.3.0364
5.
Zhao, H., Zhou, S., Chen, W., Miao, Z., & Liu, Y.-H. (2021). Modeling and Motion Control of Industrial Tractor–Trailers Vehicles Using Force Compensation. IEEE/ASME Transactions on Mechatronics, 26(2), 645–656. https://doi.org/10.1109/TMECH.2021.3057898
6.
Zhao, H., Liu, Z., Li, Z., Zhou, S., Chen, W., Suo, C., et al. (3–8 November 2019). Modelling and Dynamic Tracking Control of Industrial Vehicles with Tractor-trailer Structure. 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China. https://doi.org/10.1109/IROS40897.2019.8967986
7.
Alexander, L., Donath, M., Hennessey, M., Morellas, V., & Shankwitz, C. (1996). A Lateral Dynamic Model of a Tractor-Trailer: Experimental Validation. Minnesota Department of Transportation.
8.
Salaani, M. K., Heydinger, G. J., & Grygier, P. A. (2003). Heavy Tractor-Trailer Vehicle Dynamics Modeling for the National Advanced Driving Simulator. SAE Transactions, 112, 1018–1031.
9.
Zhao, H. (2021). Modeling, Parameter Identification and Control of Industrial Tractor-Trailers Vehicles [Doctoral Thesis, The Chinese University of Hong Kong (Hong Kong)]. ACM Digital Library. https://dl.acm.org/doi/10.5555/AAI29186065
10.
Targosz, M., Skarka, W., & Przystałka, P. (2018). Model-based optimization of velocity strategy for lightweight electric racing cars. Journal of Advanced Transportation, 2018, 361402. https://doi.org/10.1155/2018/3614025
11.
Carello, M., Bertipaglia, A., Messana, A., Airale, A. G., & Sisca, L. (2019). Modeling and optimization of the consumption of a three-wheeled vehicle. SAE Technical Paper. https://doi.org/10.4271/2019-01-0164
12.
Sawulski, J., & Ławryńczuk, M. (2019). Optimization of control strategy for a low fuel consumption vehicle engine. Information Sciences, 493, 192–216. https://doi.org/10.1016/j.ins.2019.04.047
13.
Maria, A. (1997). Introduction to Modeling and Simulation. In S. Andradottir, K. J. Healy, D. H. Withers, & B. L. Nelson (Eds.), Proceedings of 1997 Winter Simulation Conference. State University of New York at Binghamton.
14.
Wang, Y., Zou, Y., Henrickson, K., Wang, Y., Tang, J., & Park, B.-J. (2017). Google Earth elevation data extraction and accuracy assessment for transportation applications. PLoS ONE, 12(4), e0175756. https://doi.org/10.1371/journal.pone.0175756
15.
Pan, Y., Nie, X., Li, Z., & Gu, S. (2021). Data-driven vehicle modeling of longitudinal dynamics based on a multibody model and deep neural networks. Measurement, 180, 109541. https://doi.org/10.1016/j.measurement.2021.109541
16.
Wenge, C., Arendarski, B., Hansch, K., Naumann, A., & Komarnicki, P. (22–26 July 2012). Electric vehicle simulation models for power system applications. 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA. https://doi.org/10.1109/PESGM.2012.6344942
Metrics
Loading...
Journal Menu
Journal Contact
Highlights of Vehicles
Editorial Office
Highlights of Science
Avenida Madrid, 189-195, 3-3
08014 Barcelona, Spain
08014 Barcelona, Spain
Mr.
Jene Zhang
Managing Editor