Article Peer-Reviewed
Using Inverse Dynamics Technique in Planning Autonomous Vehicle Speed Mode Considering Physical Constraints
Department of Civil Engineering, Toronto Metropolitan University, Toronto, ON M5B 2K3, Canada
*
For correspondence.
Academic Editors:
 Boyuan Li, Chao Huang, Anh-Tu Nguyen, , , Peng Hang, Georgios Papaioannou and
Boyuan Li, Chao Huang, Anh-Tu Nguyen, , , Peng Hang, Georgios Papaioannou and
Received: 12 April 2023 Accepted: 22 July 2023 Published: 26 July 2023
This article is part of the Special Issue Feature Papers to the Inaugural Volume of Highlights of Vehicles.
Abstract
The study aims at improving the technique of planning the autonomous vehicles’ (AV) speed mode based on a kinematic model with physical restrictions. A mathematical model relates the derivatives of kinematic parameters with ones of the trajectory’s curvature. The inverse approach uses an expanded vehicle model considering the distribution of vertical reactions, wheels’ longitudinal reactions according to a drive type, and lateral forces ensuring motion stability. For analysis of the drive type, four options are proposed: front-wheel drive (FWD), rear-wheel drive (RWD), permanent engaged all-wheel drive (AWD), and 4-wheel drive with torque vectoring (4WD-TV). The optimization model is also built by the inverse scheme. The longitudinal speed’s higher derivatives are modeled by the finite element (FE) functions with nodal unknowns. The sequential integrations ensure the optimality and smoothness of the third derivative. The kinematic restrictions are supplemented by the tire-road critical slip states. Sequential quadratic programming (SQP) and the Gaussian N-point scheme for quadrature integration are used to minimize the objective function. The simulation results show a significant difference in the mode forecasts between four types of AV drives at the same initial conditions. This technique allows redistributing the traction forces strictly according to the wheels’ adhesion potentials and increases the optimization performance by about 40% compared to using the kinematic model based on the same technique without physical constrains.
Figures in this Article
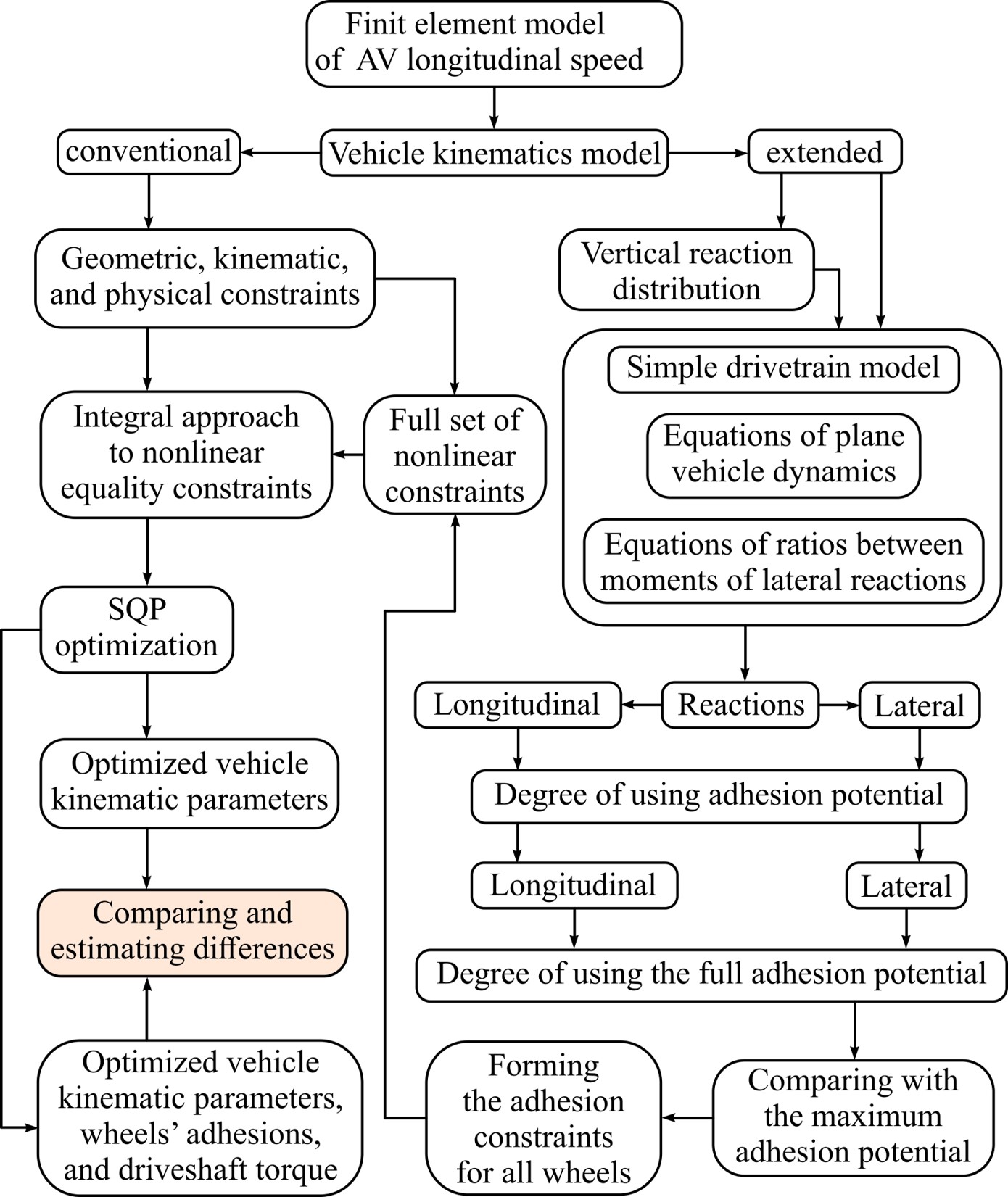 Figure 1
Figure 1
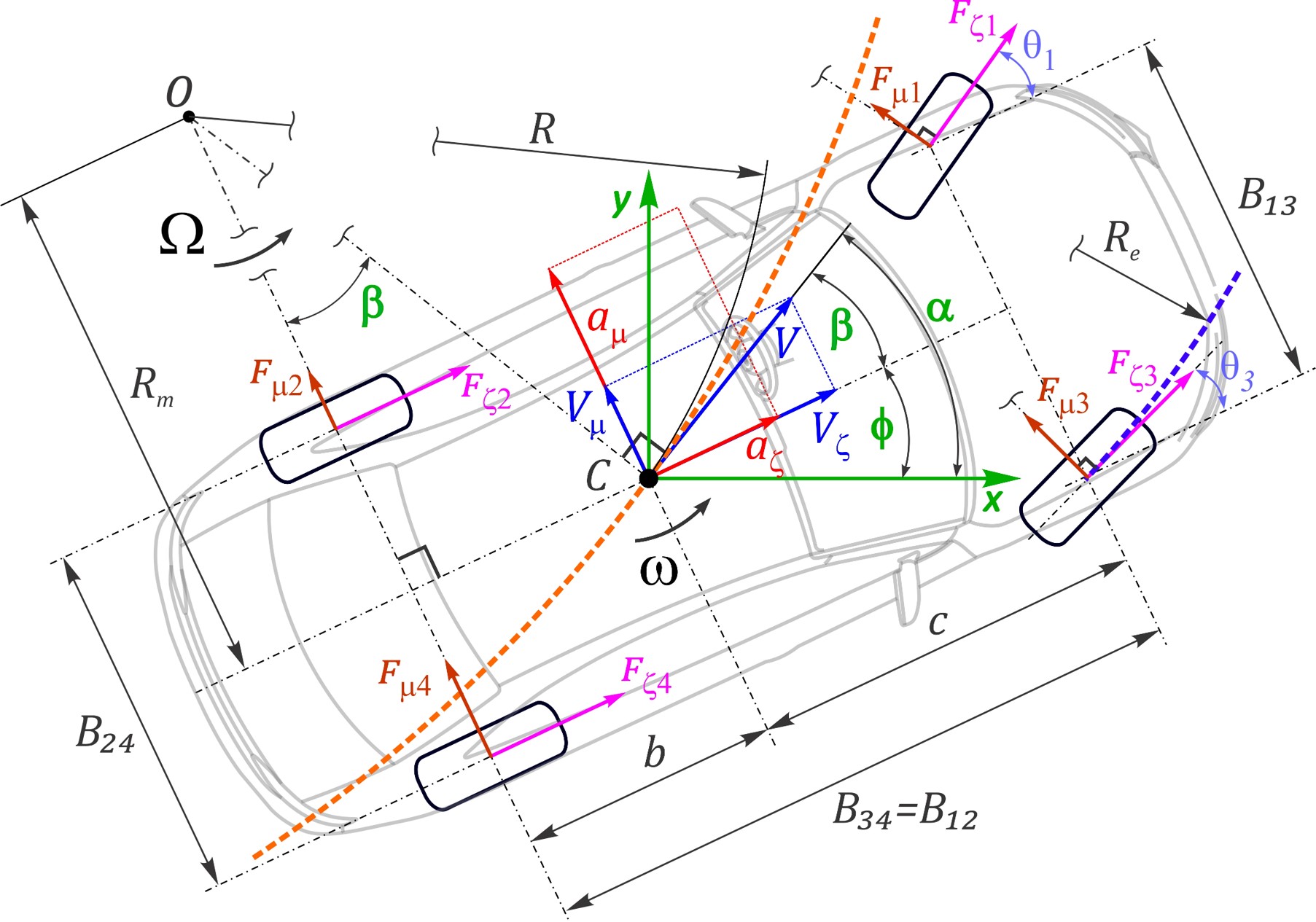 Figure 2
Figure 2
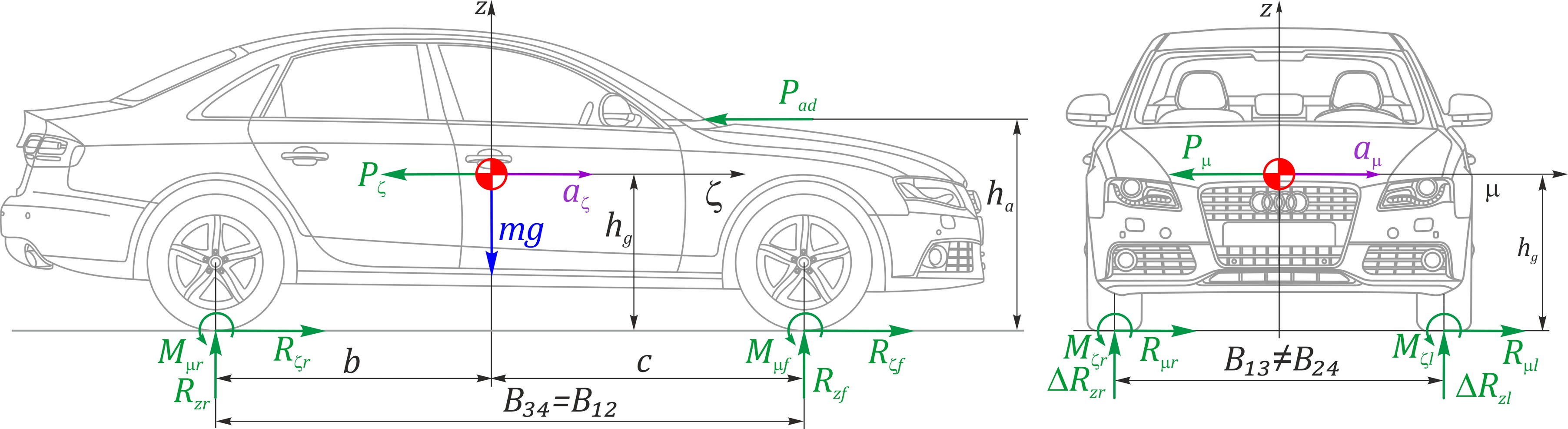 Figure 3
Figure 3
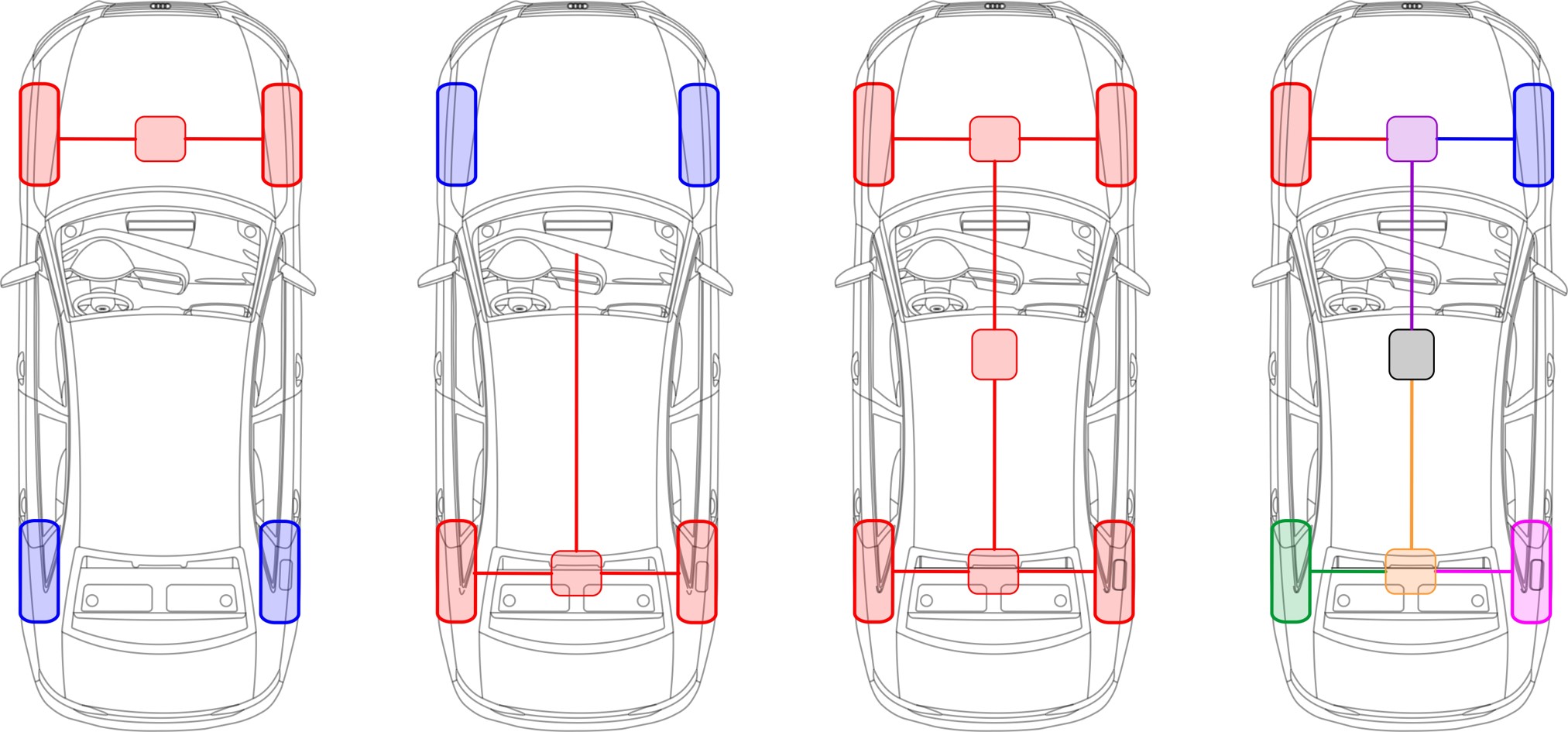 Figure 4
Figure 4
 Figure 5
Figure 5
 Figure 6
Figure 6
 Figure 7
Figure 7
 Figure 8
Figure 8
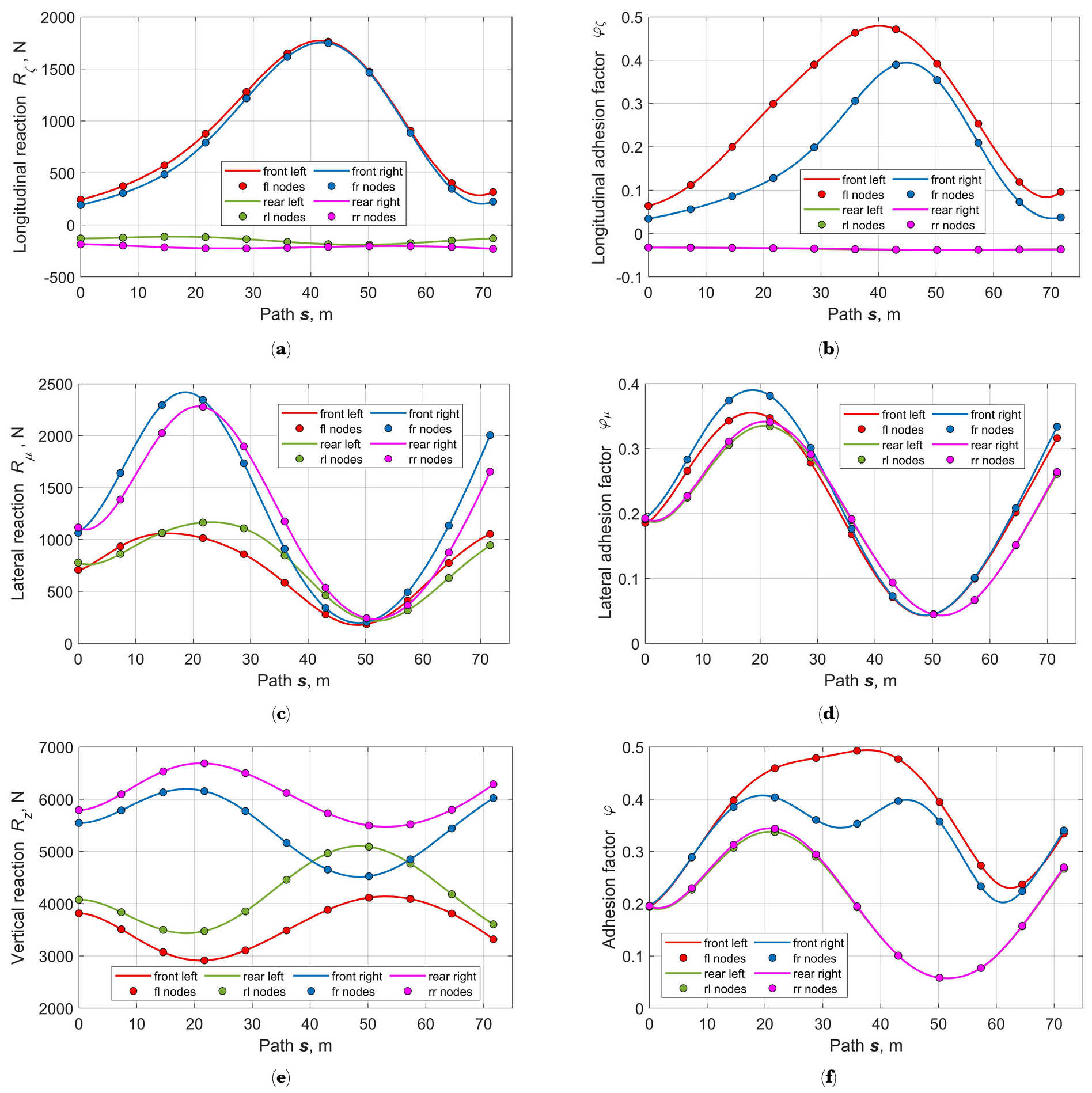 Figure 9
Figure 9
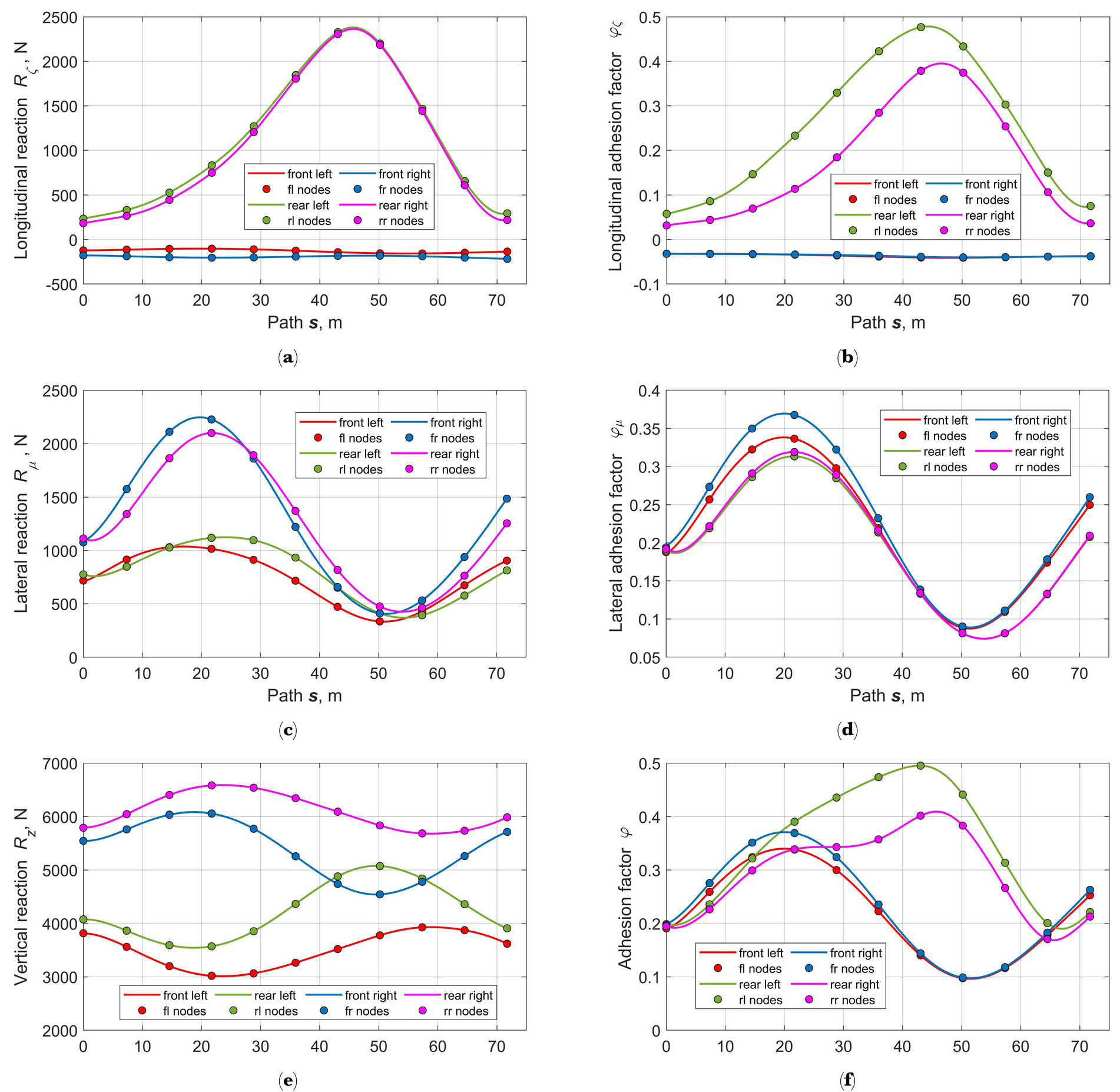 Figure 10
Figure 10
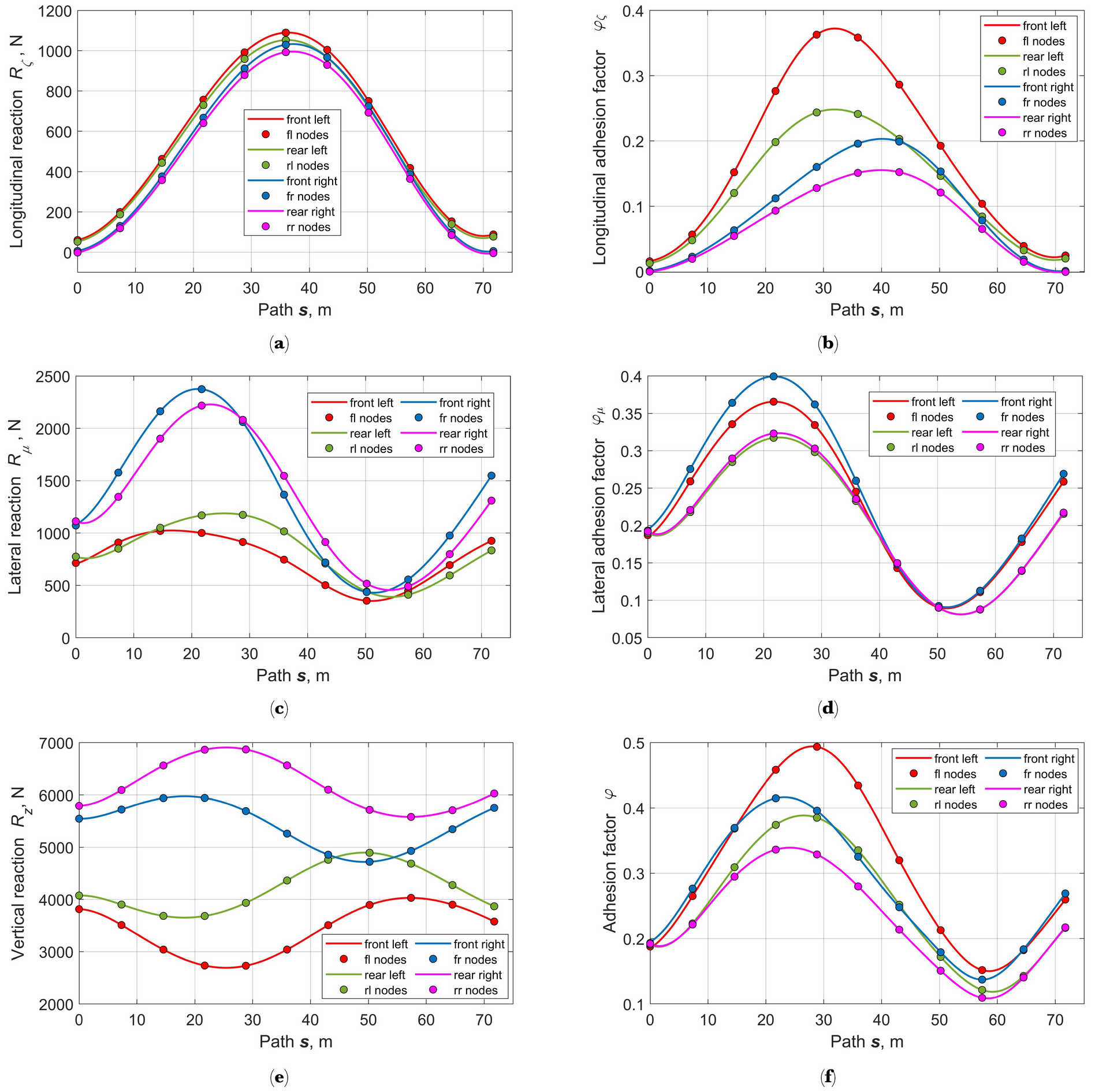 Figure 11
Figure 11
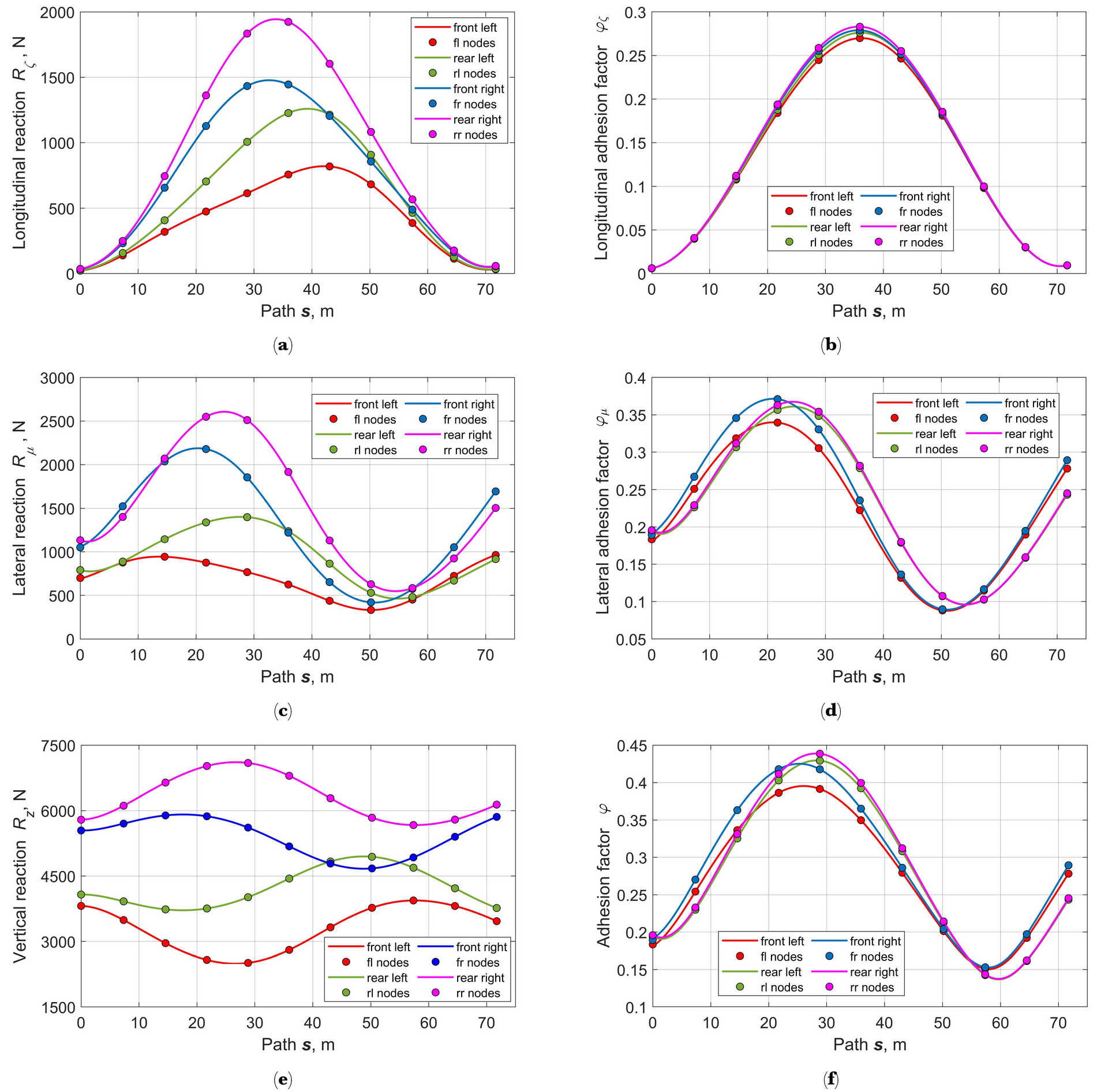 Figure 12
Figure 12
Keywords
Copyright © 2023
Diachuk and Easa. This article is distributed under the terms of the Creative Commons Attribution License (CC BY 4.0), which permits unrestricted use and distribution provided that the original work is properly cited.
Funding
This research is financially supported by the Natural Sciences and Engineering Research Council of Canada (grant No. RGPIN-2020-04667).
Cite this Article
Diachuk, M., & Easa, S. M. (2023). Using Inverse Dynamics Technique in Planning Autonomous Vehicle Speed Mode Considering Physical Constraints. Highlights of Vehicles, 1(1), 29–53. https://doi.org/10.54175/hveh1010003
References
1.
Velenis, E. & Tsiotras, P. (2005). Optimal velocity profile generation for given acceleration limits: receding horizon implementation. In Proceedings of the 2005 American Control Conference (Vol. 3, pp. 2147–2152). IEEE. https://doi.org/10.1109/ACC.2005.1470288
2.
Lo Bianco, C. G. (2006). Optimal Velocity Planning for Autonomous Vehicles Under Kinematic Constraints. IFAC Proceedings Volumes, 39(15), 126–131. https://doi.org/10.3182/20060906-3-IT-2910.00023
3.
Shimizu, Y., Horibe, T., Watanabe, F., & Kato, S. (2022). Jerk Constrained Velocity Planning for an Autonomous Vehicle: Linear Programming Approach. ArXiv. https://doi.org/10.48550/arXiv.2202.10029
4.
Liu, C., Zhan, W., & Tomizuka, M. (2017). Speed profile planning in dynamic environments via temporal optimization. In 2017 IEEE Intelligent Vehicles Symposium (IV) (pp. 154–159). IEE. https://doi.org/10.1109/IVS.2017.7995713
5.
Chen, Y., Hu, C., & Wang, J. (2020). Motion Planning with Velocity Prediction and Composite Nonlinear Feedback Tracking Control for Lane-Change Strategy of Autonomous Vehicles. IEEE Transactions on Intelligent Vehicles, 5(1), 63–74. https://doi.org/10.1109/TIV.2019.2955366
6.
Solea, R., & Nunes, U. (2006). Trajectory Planning with Velocity Planner for Fully-Automated Passenger Vehicles. In 2006 IEEE Intelligent Transportation Systems Conference (pp. 474–480). IEEE. https://doi.org/10.1109/ITSC.2006.1706786
7.
Zhang, Y., Chen, H., Waslander, S. L., Yang, T., Zhang, S., Xiong, G., et al. (2018). Speed Planning for Autonomous Driving via Convex Optimization. In 2018 21st International Conference on Intelligent Transportation Systems (ITSC) (pp. 1089–1094). IEEE. https://doi.org/10.1109/ITSC.2018.8569414
8.
Zhang, Y., Chen, H., Waslander, S. L., Yang, T., Zhang, S., Xiong, G., et al. (2018). Toward a More Complete, Flexible, and Safer Speed Planning for Autonomous Driving via Convex Optimization. Sensors, 18(7), 2185. https://doi.org/10.3390/s18072185
9.
Wang, M., Wang, Z., Zhang, L., & Dorrell, D. G. (2020). Speed Planning for Autonomous Driving in Dynamic Urban Driving Scenarios. In 2020 IEEE Energy Conversion Congress and Exposition (ECCE) (pp. 1462–1468). IEEE. https://doi.org/10.1109/ECCE44975.2020.9235659
10.
Duhautbout, T., Talj, R., Cherfaoui, V., Aioun, F., & Guillemard, F. (2020). Efficient Speed Planning in the Path-Time Space for Urban Autonomous Driving. In IEEE 25th International Conference on Intelligent Transportation Systems (ITSC) (pp. 1268–1274). IEEE. https://doi.org/10.1109/ITSC55140.2022.9921820
11.
Chen, Y., Xin, R., Cheng, J., Zhang, Q., Mei, X., Liu, M., et al. (2022). Efficient Speed Planning for Autonomous Driving in Dynamic Environment with Interaction Point Model. ArXiv. https://doi.org/10.48550/arXiv.2209.09013
12.
Lin, L., Coskun, S., Wang, J., Fan, Y., Zhang, F., & Langari, R. (2021). Velocity Prediction Based on Vehicle Lateral Risk Assessment and Traffic Flow: A Brief Review and Application Examples. Energies, 14(12), 3431. https://doi.org/10.3390/en14123431
13.
Li, K. & Jia, Q.-S. (2021). Speed Planning for Autonomous Vehicles at Intersections. In 2021 40th Chinese Control Conference (CCC) (pp. 4715–4720). IEEE. https://doi.org/10.23919/CCC52363.2021.9549294
14.
Huang, C., Salehi, R., Ersal, T., & Stefanopoulou, A. G. (16–20 July 2018). Optimal Speed Planning using Limited Preview for Connected Vehicles with Diesel Engines. The 14th International Symposium on Advanced Vehicle Control, Beijing, China.
15.
Jeong, Y., Yoo, J., Yoon, Y., & Yi, K. (2020). Collision Preventive Velocity Planning Based on Static Environment Representation for Autonomous Driving in Occluded Region. In 2020 IEEE Intelligent Vehicles Symposium (IV) (pp. 425–430). IEEE. https://doi.org/10.1109/IV47402.2020.9304540
16.
Lin, F., Chen, Y., Zhao, Y., & Wang, S. (2019). Path tracking of autonomous vehicle based on adaptive model predictive control. International Journal of Advanced Robotic Systems, 16(5). https://doi.org/10.1177/1729881419880089
17.
Mizushima, Y., Okawa, I., & Nonaka, K. (2019). Model Predictive Control for Autonomous Vehicles with Speed Profile Shaping. IFAC-PapersOnLine, 52(8), 31–36. https://doi.org/10.1016/j.ifacol.2019.08.044
18.
Yang, J., Chen, W., Wang, Y. (2014). Estimate Lateral Tire Force Based on Yaw Moment without Using Tire Model. International Scholarly Research Notices, 2014, 934181. https://doi.org/10.1155/2014/934181
19.
Song, Y., Shu, H., Chen, X., & Luo, S. (2019). Direct-yaw-moment control of four-wheel-drive electrical vehicle based on lateral tyre–road forces and sideslip angle observer. IET Intelligent Transport Systems, 13(2), 303–312. https://doi.org/10.1049/iet-its.2018.5159
20.
Arogeti, S. A., & Berman, N. (2012). Path Following of Autonomous Vehicles in the Presence of Sliding Effects. IEEE Transactions on Vehicular Technology, 61(4), 1481–1492, https://doi.org/10.1109/TVT.2012.2186991
21.
Grishkevich, A. I. (1986). Automobiles Theory: Textbook for high schools. Minsk High School.
22.
Pacejka, H. B. (2012). Tire and Vehicle Dynamics (3rd ed.). Elsevier.
23.
Automobile catalog. (2023). Audi A4 Quatro Characteristics. http://www.automobile-catalog.com/car/2011/1187660/audi_a4_3_2_fsi_quattro_attraction_tiptronic.html (accessed 19 January 2023).
24.
MathWorks. (2023). MATLAB R2022b. https://www.mathworks.com (accessed 22 January 2023).
25.
Diachuk, M., & Easa, S. M. (2022). Motion Planning for Autonomous Vehicles Based on Sequential Optimization. Vehicles, 4(2), 344–374. https://doi.org/10.3390/vehicles4020021
Metrics
Loading...
Journal Menu
Journal Contact
Highlights of Vehicles
Editorial Office
Highlights of Science
Avenida Madrid, 189-195, 3-3
08014 Barcelona, Spain
08014 Barcelona, Spain
Mr.
Jene Zhang
Managing Editor